為何車身傾斜會使車把手轉向?人類直到1880年代才了解的操控原理, 乃是自行車發展史的最重要里程碑, 無價的知識。
信源:Trail/Head angle對單車穩定性與操控性的影響
How does a bicycle in motion maintain its balance ?
A bicycle maintains its balance when in forward motion by being steered in the direction of any lean that develops.
When a rider notices the bike starting to lean, say to the left, he steers the bike a little to the left. Once the bike is moving in a slightly circular path to the left, the centripetal force of the turning bike generates an outward force at the center of gravity of the bike, which is well above the ground, thus cancelling the tendency to fall. Next, the rider adjusts his path to the desired direction of travel. Now the centripetal force is proportional to the square of one's speed, so the faster one travels, the smaller the steering required to right the bike. When the bike is stationary, there is no centripetal force available and one needs a totally different, and much harder technique, to maintain balance. The centripetal force is from the circular path of the bike, and not from the rotation of the wheels.
Several features of most bikes help with turning towards a lean and, under certain circumstance, may even keep a riderless bike upright. One is "trail" the distance that the front wheel contact point trails behind where the steering axis intersects the ground. As the bike leans, the upward force of the ground on the wheel combined with this distance creates a torque about the steering axis that tends to turn the wheel in the direction of the lean. Another is gyroscopic precession. As gravity pulls down on the center of mass of a leaning bike it creates a torque about the line between the contact patches. The spinning wheels tend to precess in response to this torque, meaning they tend to rotate about an axis that is perpendicular both to their spin axis and the axis of the applied torque, an approximately vertical axis. The rear wheel is prevented from precessing by friction between the wheels and the ground. The front wheel, however, has some freedom to precess about the approximately vertical steering axis, and thereby tends to steer in the direction of the lean. These two effects, plus some other usually smaller ones, depend on the bike's geometry, mass distribution, and forward speed. For a traditional utility bike, the forward speed at which they effects are able to keep a riderless bike upright, even when bumped to the side, is between 4 and 6 m/s (9 - 13 mph).
A bicycle rolling forward in a straight line balances when the front wheel is steered toward the direction it is leaning. This moves the support points, the tire contact patches, back under the center of gravity.
The necessary steering of the front wheel is usually provided by the rider and, under certain conditions, can be provide entirely by the bike. The factors that contribute to a bike's ability to balance itself include trail, the amount that the front wheel contact patch trails behind the steering axis, gyroscopic precession of the front wheel, and mass distribution.
In 2011, researchers at the Technical University of Delft built a bike with zero trail and counter-rotating wheels that completely cancel any gyroscopic effect specifically to prove the point that it could still be self-stable. It stays up without a rider when rolling forward at the right speed even after being perturbed from upright by being struck from the side.
On the other hand, a bike with a fixed front wheel that cannot be steered is nearly impossible to ride. |
 融资租赁行业2023年回顾与2024年展望
联合资信主要观点:
2023年10月下发了金融租赁公司管理办法,体现了监管机构对
融资租赁行业2023年回顾与2024年展望
联合资信主要观点:
2023年10月下发了金融租赁公司管理办法,体现了监管机构对
 2023年租赁业调查报告(毕马威)
毕马威连续第5年发布租赁业调查报告。本刊结合租赁行业热点话题提供专业洞察,并汇总
2023年租赁业调查报告(毕马威)
毕马威连续第5年发布租赁业调查报告。本刊结合租赁行业热点话题提供专业洞察,并汇总
 2021年度融资租赁业调查报告
2021年度融资租赁业调查报告
下载地址:原链接
2021年度融资租赁业调查报告
2021年度融资租赁业调查报告
下载地址:原链接
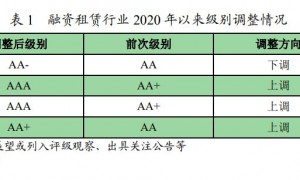 2021年融资租赁行业信用风险展望
一、融资租赁行业 2020 年信用风险回顾
1.信用等级迁移及风险事件回顾
202
2021年融资租赁行业信用风险展望
一、融资租赁行业 2020 年信用风险回顾
1.信用等级迁移及风险事件回顾
202
 《金融租赁行业发展报告(2007-2017)》
金融租赁行业发展报告(2007-2017)
《报告》主体内容分为导言、发展篇、环境篇、资产
《金融租赁行业发展报告(2007-2017)》
金融租赁行业发展报告(2007-2017)
《报告》主体内容分为导言、发展篇、环境篇、资产

 加入QQ群组
加入QQ群组 关注官方微信
关注官方微信